AI 로봇선도학교
OpenCR Setup(로봇구동부)
 AI 로봇선도학교OpenCR Setup(로봇구동부)
AI 로봇선도학교OpenCR Setup(로봇구동부)
OpenCR Setup(로봇구동부)
OpenCR Setup 김성두
개념: Open Source 기반의 로봇제어기 OpenCR은 Turtlebot의 실제 구동을 담당 합니다. SBC에서 제어가능토록 구성하여 더 강력한 기능을 구현 할 수 있도록 합니다. OpenCR 은 운영체제가 탑재되지 않고 빌드된 firmware로만 작동합니다. Setup 과정도 앞 메뉴에서 먼저 구성한 SBC 를 통하여 firmware를 업로드합니다.
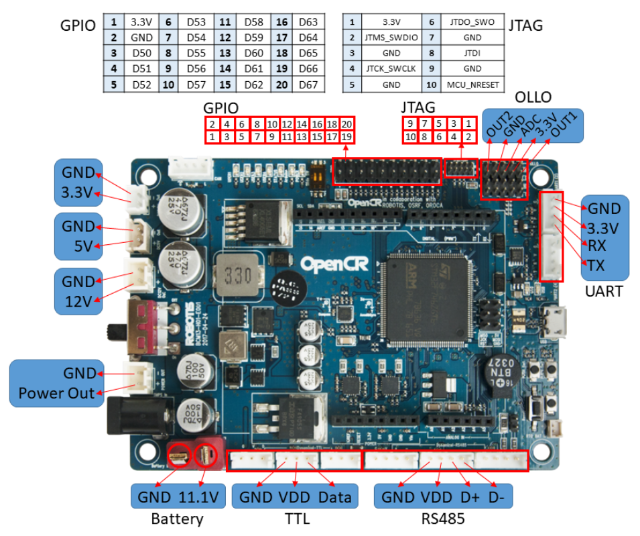
1. USB 연결 SBC에서 OpenCR의 mini USB 단자로 케이블을 연결합니다.
2. RaspberryPi에서 아래 순서로 작업합니다. $ sudo dpkg --add-architecture armhf $ sudo apt-get update $ sudo apt-get install libc6:armhf $ export OPENCR_PORT=/dev/ttyACM0 $ export ENCR_MODEL=waffle $ rm -rf ./opencr_update.tar.bz2 $ wget https://github.com/ROBOTIS-GIT/OpenCR-Binaries/raw/master/turtlebot3/ROS2/latest/opencr_update.tar.bz2 $ tar -xjf ./opencr_update.tar.bz2 $ cd ~/opencr_update $ ./update.sh $OPENCR_PORT $OPENCR_MODEL.opencr
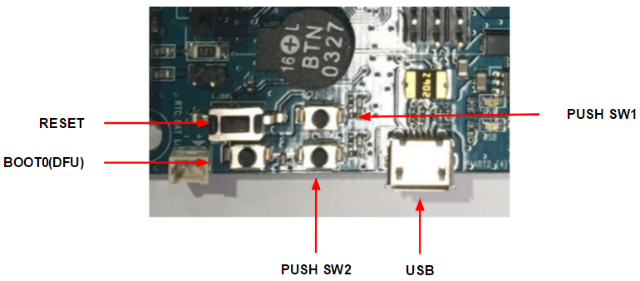
3. Reset 방법 Firmware 업로드가 실패할 경우 SW2를 누른 상태에서 RESET버튼을 한번 누른다음 SW2 스위치에서 손을 뗍니다.
|