AI 로봇선도학교
로봇개발 방향
 AI 로봇선도학교로봇개발 방향
AI 로봇선도학교로봇개발 방향
로봇개발 방향
로봇 개발방향 김성두
우리가 탐구하는 Turtlebot 에 대한 저의 개인적인 관점입니다.
로봇이 작동하기 위해서는 어떤 조건이 먼저 선행되어야 하는지 알아봅니다.
1. 로봇의 위치가 확정되어야 합니다. - 절대 좌표 또는 상대 좌표에 로봇의 위치가 정해져야 합니다. - 위치를 추정하는 방법으로 GPS, WIFI, IR Camera, Bluetooth Beacon, Dead Reckoning 등이 있으며 각기 장단점이 있습니다.
2. 대상물이 측정 되어야 합니다. - 물체 벽 함정 까지의 거리, 색상, 명도 채도 등이 계측되어야 합니다. - Dept Camera, Stereo Camera, Omni Camera, 레이져 센서, 적외선 센서 등이 있으며 이미지 센서를 활용하는 방법도 개발되고 있습니다.
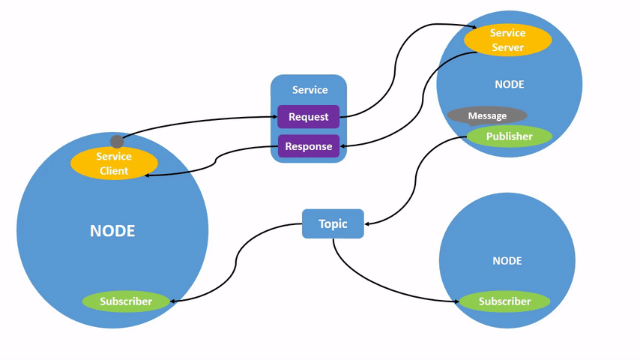
3. 기기들 간의 통신이 이루어져야 합니다. - 우리가 학습하는 ROS (Robot Operating System)에서는 종말단계의 노드를 크기가 작게 잘게 쪼개어 서로 독립적으로 사용할 수 있도록 개발하고 있습니다. 이는 재사용을 편리하게 하는 장점이 있습니다. 그러나 반대로 노드들 간에 주고받는 입출력 데이터는 더 많아지게 됩니다. - Node, Topic, Service 가 대표 통신 방식이며 이 데이타를 메세지라고 일컫습니다. - 운영체제를 거치지 않고 노드들 간에 직접 통신이 이루어지도록 구성하는 방법이 언급된 곳이 아래 링크에 연결된 DDS 통신 방법입니다. 리얼타임 구현과도 연관있습니다. 리얼타임이 중요한 이유는 빠른 시간에 통신이 되어야 로봇이 넘어질때 바로 중심을 잡는다거나 자율주행 자동차가 제 시간안에 작동하게 하는 기술이기 때문입니다. http://msja-h.gne.go.kr/msja-h/cm/cntnts/cntntsView.do?mi=550498&cntntsId=20383
위 세가지가 만족되면 우리는 로봇을 제어할 수 있을것입니다.
다음은 로봇개발 방향에 대한 생각입니다.
https://www.seoul.co.kr/news/newsView.php?id=20200326025001
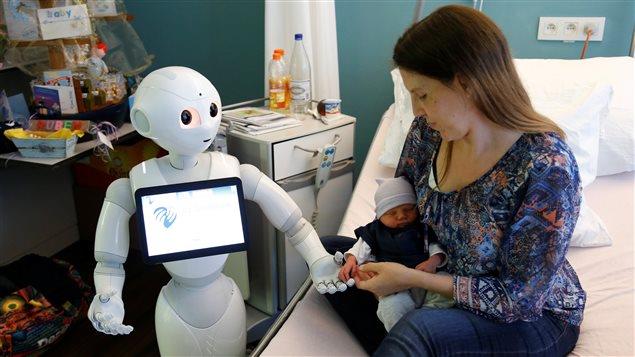
로봇개발은 매우 광대한 영역입니다. 서비스 로봇(가정용 간호 로봇)을 개발한다고 가정했을때 위에 언급한 로봇의 위치 제어, 대상물을 측정하는 센서 개발 그것에 필요한 프그램개발, 기기 하드웨어 개발 이에 따른 프로그램 제작 등 매우 많은 영역이 있다고 생각합니다. 다른 방법으로는 이미 오픈소스로 개발되어 있는 부분은 그대로 가져와서 활용하고 최종 소비자에게 필요한 기능을 추가 한다던지 하는 매우 다양한 개발 영역이 있습니다. |