AI 로봇선도학교
Manipulator (로봇팔)
 AI 로봇선도학교Manipulator (로봇팔)
AI 로봇선도학교Manipulator (로봇팔)
Manipulator (로봇팔)
Manipulator 빌드 김성두
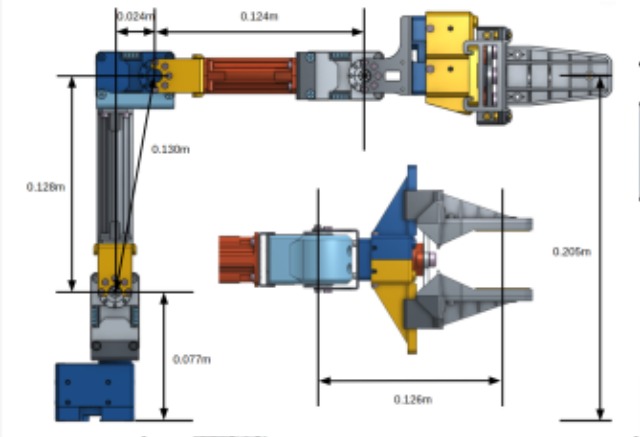
개념: OPENMANIPULATOR는 오픈소스 기반의 소프트웨어와 하드웨어가 제공되는 로봇 팔입니다. 로봇운영체제 ROS을 통하여 제어하던지 OPENCR을 이용하여 제어가 가능합니다. 이 로봇팔은 바닥에 고정해서 사용해도 되고 로봇에 올려 사용도 가능합니다. 우리의 교육적 목표는 MANIPULATOR가 물건을 집어 옮기는 작업과, 로봇이 MANIPULATOR을 장착한 후 스스로 목표 지점으로 이동하여 물건을 집어 제자리로 되돌아 와서 물건을 놓는 과정을 시연하는 것입니다.
베이스는 Ubuntu 20.04 에 ros2 foxy 구성입니다.
$ sudo apt update $ wget https://raw.githubusercontent.com/ROBOTIS-GIT/robotis_tools/master/install_ros2_foxy.sh $ chmod 755 ./install_ros2_foxy.sh $ bash ./install_ros2_foxy.sh : ros 의존성 관리 패키지 설치, pip는 우분투 아닌곳에서 사용함
$ sudo apt install ros-foxy-rqt* ros-foxy-joint-state-publisher $ cd ~/colcon_ws/src/ $ git clone -b foxy-devel https://github.com/ROBOTIS-GIT/DynamixelSDK.git $ git clone -b ros2 https://github.com/ROBOTIS-GIT/dynamixel-workbench.git $ git clone -b foxy-devel https://github.com/ROBOTIS-GIT/open_manipulator.git $ git clone -b ros2 https://github.com/ROBOTIS-GIT/open_manipulator_msgs.git $ git clone -b ros2 https://github.com/ROBOTIS-GIT/open_manipulator_dependencies.git $ git clone -b ros2 https://github.com/ROBOTIS-GIT/robotis_manipulator.git $ cd ~/colcon_ws && colcon build --symlink-install --------------------------
이상의 작업으로 빌더가 제대로 되지 않을때는 아래와 같이 조치함 $ sudo apt update $ rosdep update : user권한으로 실행 해야함 $ rosdep install --from-paths src --ignore-src -r -y : 항상실시 또는 rosdep install -i --from-path src --rosdistro foxy -y 작업공간에 있는 (src에 있는) 모든 패키지들의 종속성을 확인해 패키지를 설치
$ colcon build --symlink-install : 실제로 복사하지는 않고 링크만 걸어준다는 뜻이며 그러면 install 에 생성됨 이것을 적용하려면 source 해 주어야하는데 이것은 오버레이로 구성되어 작동됨을 의미함.
만약 빌드가 안될경우 아래와 같이 빌드함 $colcon build --symlink-install --packages-up-to 패키지명 $ source /opt/ros/foxy/setup.bash $ source ~/colcon_ws/install/local_setup.bash 를실행해야 된다. (그래서 .bashrc 에 모두 포함시켜 놓음)
초기 작동 (U2D2 로 매니퓰레이트에 연결 시) $ ros2 launch open_manipulator_x_coltroller open_manipulator_x-controller.launch.py : 작동이 안되거나 에러 메시지가 발생하면 철자를 자세히 확인 및 usb포트의 퍼미션을 허가해 주어야 합니다.
매니퓰레이터 상태 확인 및 시각 툴 $ ros2 topic pub /option std_msgs/String "data: print_open_manipulator_x_setting" $ rqt _graph : 각종 값 표시창 $ ros2 launch open_manipulator_x_description open_manipulator_x_rvix.launch.py : 시각 툴
키보드 작동 $ros2 run open_manipulator_x_teleop teleop_keyboard : 전진-w 후진-x 좌-a 우-d 위-q 아래-z
Joint Space control - joint1 증-y 감-h - joint2 증-u 감-j - joint3 증-i 감-k - joint4 증-o 감-l - joint5 증-f 감-g - INIT = 1, HOME = 2 : 그립에서 에러 메세지가 발생할 수 있으나 마이너한 것일 가능성이 높음 |