AI 로봇선도학교
Error(고장시 대처)
 AI 로봇선도학교Error(고장시 대처)
AI 로봇선도학교Error(고장시 대처)
Error(고장시 대처)
Error 김성두
.
error 발생에 대한 이야기 입니다. 새로운 기기를 만지다보면 예상치 못한 오류들을 만나게 됩니다. 정해진 다음 결과가 나와야 하는데 인터넷에도 등장하지 않는 처음보는 에러 상황에 마딱뜨리게 되고 진척없이 시간이 흘러가는 경우도 많습니다. 이것을 해결하는 저의 방법으로는 일단 어느 부분이 문제인지 에러메세지가 무었을 나타내는지 세세히 살피는 것이 중요하다고 생각합니다. 자세히 들여다 보면 실꼬투리 만한 작은 힌트가 들어 있는 경우가 많습니다. 그걸 보는게 귀찮아서 건너 뛴다면 다음 단계로 넘어 갈수가 없습니다. 그 다음으로 힌트를 찾았어면 구글링을 다시 합니다. 운 좋으면 하루만에 찾을수도 있고 아니면 며칠 헤맬수도 있습니다. 불행히도 구글에 없으면 스스로 기초구조 부터 확인하면서 단계를 밟아가야 합니다. 운영체제와의 문제인지 전류가 부족한지 고장난 부품이 있는지 등을 확인합니다. 발생한 에러 중 쉽게 해결이 어렵다 생각되는 것 위주로 기록을 누적해서 남기도록 하겠습니다.
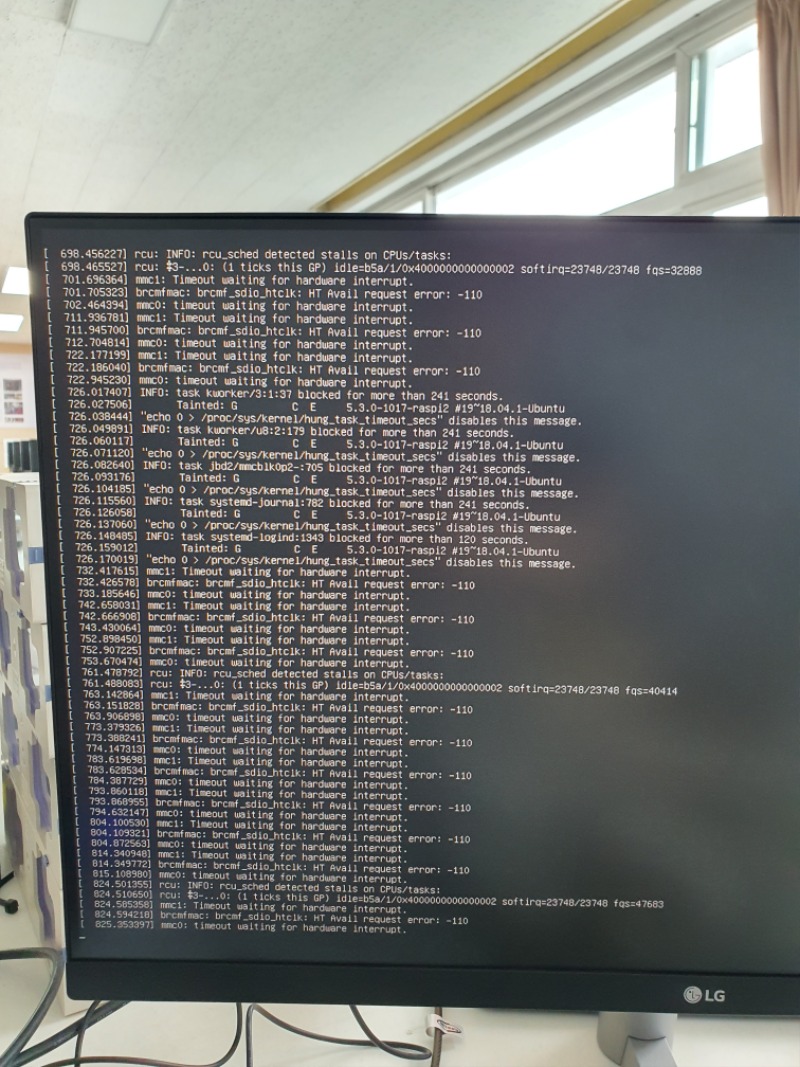
1. ubuntu 18.04 + raspbarry 3+ + manipulator 에서 ros 실행시 약 2분 후 인터럽터 에러 발생의 경우
- 생각: open CR 고장? 메모리 불량? 패키지간의 충돌? 버젼문제? - 방향: 화면 메세지가 인터럽터가 안된다는 이야기 - 화면 중간에 disables this messige 에서 일단 이 메세지가 나오지 않게 만들어라고 함 - 파악: 인터럽터가 잘 안되는상황인데 하드웨어의 성능이 따라오지 못하는가? 사용되는 프로세스가 문제를 일으키는가? 커널이 업데이트 되어 버렸고 사용하는 특정프로세스가 이를 따라가지 못하는가? - 처리: 우선 메세지가 나오지 않도록 처리함 $ chmod 775 .... $ echo 1 > /proc/kernel/............... 재부팅 후 ros 다시 실행하고 상황주시 함 - 계속 에러시 : 오랜 시간을 요함을 미리 생각하고 처음부터 새롭게 조립하는 단계를 진행하면서 버젼을 정확히 체크 함. - 부품의 문제: 여분의 부품을 활용하여 다시 조립하는 과정을 거침
|